Research
A brief summary of the research projects I've been fortunate to participate in. While my interests may seem disparate, convex optimization is the thread that loosely binds them.
See my scholar page or arXiv uploads for a complete list of publications.
Certifiable Sensor Calibration
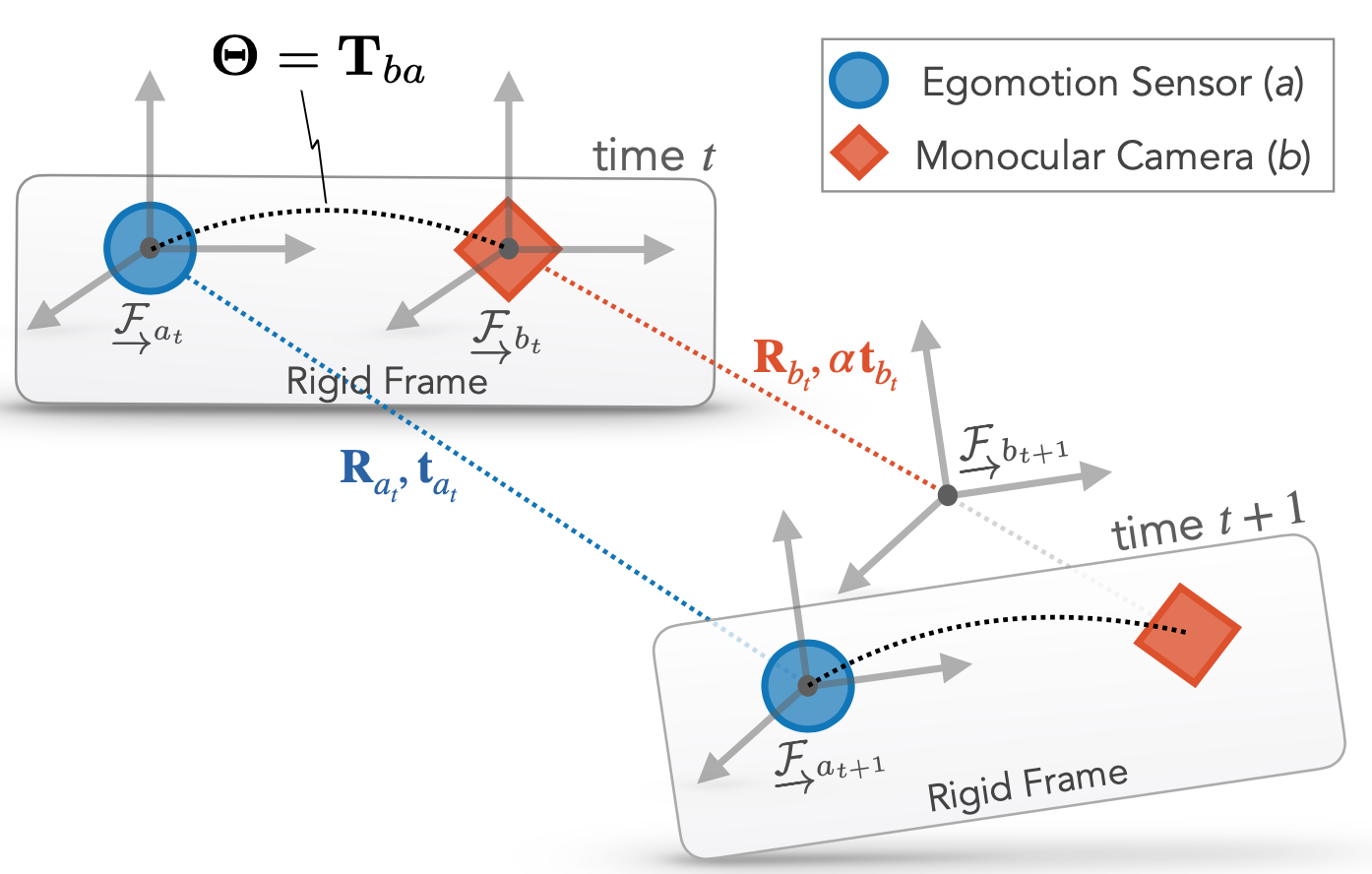
Spatial calibration of multiple sensor calibration is crucial for accurate multi-sensor fusion. I've developed a certifiably globally-optimal approach to this classic extrinsic calibration problem for any sensor capable of describing its motion (up to scale). My algorithms are easy to use, and formally guaranteed to avoid local minima with low-noise measurements.
Distance-Geometric Inverse Kinematics
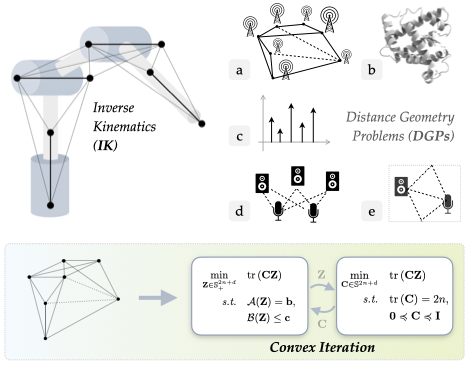
My colleague Filip Marić and I are working on a series of papers that look at inverse kinematics (IK) from a fresh distance-geometric perspective. This view eschews joint angular variables and instead describes robot kinematics with distance constraints on points fixed to the robot's joint axes. We solve the resulting quadratic optimization problems with various techniques, some of which we've implemented in MATLAB and Python.
Principled Representations of SO(3) for Learning
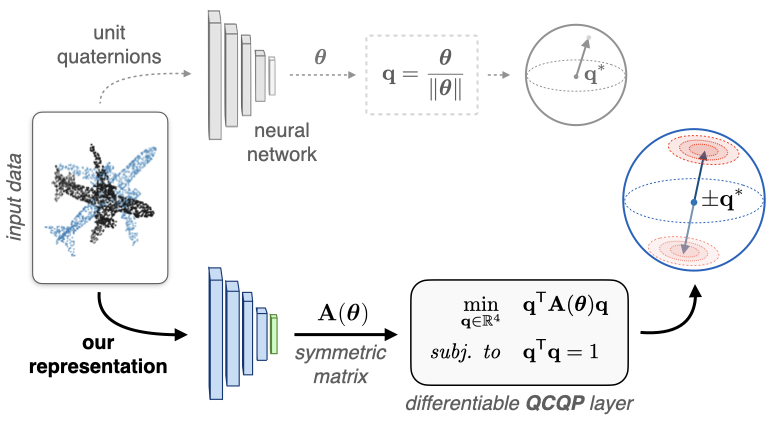
I assisted my colleague Valentin Peretroukhin in the development of a novel differentiable rotation representation. We formally proved (and experimentally verified) that our Bingham distribution-based representation of rotations possesses (among other virtues) a continuity property that makes it an excellent choice for deep learning pipelines.
Resource-Efficient Multi-Robot SLAM

Alongside colleagues at MIT, I developed methods for optimal communication policies in multi-robot SLAM. Plainly speaking, our algorithms help a team of robots performing a collaborative mapping taks which measurements they should share with one another to create an accurate map in a bandwidth-limited or computation-constrained environment.